
Equipe 6 groupe BC
EPI SCIENCES
Nom du Robot :
Eurêka
ETAPE 1
PROBLÉMATIQUE n°1 :
Où positionner notre capteur de couleur pour optimiser le suivi d'une ligne ?
Vidéo du test final du placement du capteur de couleur.
A) Hypothèses :
Nous pensons que le capteur peut fonctionner devant au milieu (côté roues), mais pas aux alentours de la bille ou sous le boitier.
B) Essais :
Nous avons placé le capteur selon nos hypothèses, et avons vu que si le capteur était à l'avant (côté roues) à gauche ou au milieu, il fonctionnait, en revanche, si il est à droite, à coté de la bille ou en dessous du robot, alors il ne fonctionne pas.
Schéma des capteurs placés à différents endroits du robot
C) Conclusion :
Nous pensons que la place idéale du capteur est devant (côté roues, toujours) à gauche, car les conditions sont idéales pour que sa rotation soit meilleure.
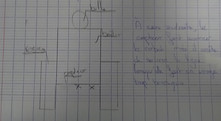

Schéma du placement du capteur de couleur (réussi mais pas parfait)
Schéma du placement du capteur de couleur (raté)
ETAPE 2
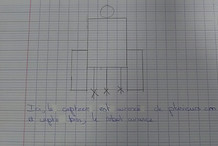
Schéma du placement du capteur de couleur réussi (modèle final à gauche)
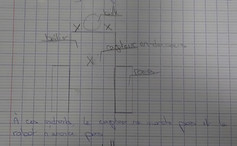
Schéma du placement du capteur de couleur (raté)
PROBLÉMATIQUE n°1 :
Comment rendre notre futur robot le plus maniable et stable possible ?
A) Hypothèses :
B) Essais :
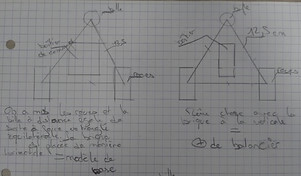
Nous pensons qu'idéalement, la structure de notre robot doit être formée d'un triangle équilatéral, en reliant les deux roues et la bille, de plus, nous prévoyons d'orienter la brique de commande à plat et vers le haut. Cela permettrait que le centre de gravité du robot soit le plus bas et le plus centré possible.


C) Conclusion :
Les options les plus intéressantes se révèlent alors être les dernières testées (les roues et la bille en triangle équilatéral ou en triangle isocèle), en effet, le centre de gravité est plus bas que jamais, et elles ont malgré tout une grande liberté de déplacement
Nous avons tout d'abord fait un test dans lequel nous avons placé les roues en triangle équilatéral (voir schéma), et placé la brique à l'horizontal, nous l'avons ensuite placé à la verticale et avons noté deux points importants : 1 le centre de gravité est plus bas; 2 malgré ça, un mouvement de balancier créé un déséquilibre à chaque virages serrés. Enfin, nous avons écarté les deux roues, et fait un triangle isocèle. La dernière option se révèle alors la meilleure
.jpg)
Schéma du placement des roues/ bille en triangle isocèle
Schéma du placement des roues/ bille en triangle équilatéral (brique horizontale et verticale).
Image du robot selon le premier schéma
Image du robot selon le second schéma (en dessous)
ETAPE 3
PROBLÉMATIQUE n°1 :
Réalisation du prototype du châssis
A) CONTRAINTES :
Triangle : équilatérale
Brique : Horizontale
Capteur couleur : Devant à gauche
Capteur ultrason :Devant droite
3ème moteur : Derrière
Contact : Devant au millieu

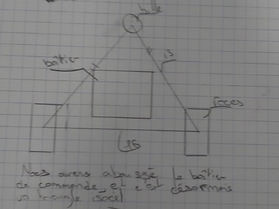
schéma sur papier du châssis d'Eurêka
C) SOLUTION :

Chassis en Polypropylène alvéolaire d'Eurêka
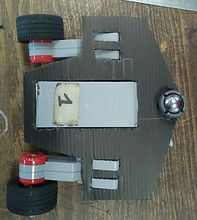
Chassis en Polypropylène alvéolaire d'Eurêka
B) DÉMARCHE :
Nous avons tout d'abord fait notre schéma sur papier à l'échelle, après deux essais non concluants, nous avons opté pour celui ci joint, pour ensuite le découper sur de l'Altuglass.
schéma sur Polypropylène alvéolaire du châssis d'Eurêka

Nous avons respecté toute les contraintes, et avons réalisé le châssis ci-dessus.
ETAPE 4
Réalisation du châssis :


nous avons modélisé en 3D notre châssis grâce à solidwork